


|
Finger Prince posted:If one of those chutes deploys on a fixed wing a/c when it isn't supposed to, it maybe gets tangled in the empenage when you cut it free, which would suck, but you can still fly. If one goes off on that multirotor, let's say when it's climbing, it's going to get tangled in half if not more of your propulsion rotors, and then you're hosed. Make it cut the power to the rotors if it deploys. Might still have the potential for problems if it's climbing at maximum rate, but that'd certainly help minimize the risk of tangling. e:f;b
|
 #
?
Mar 14, 2018 16:39
#
?
Mar 14, 2018 16:39
|
|


|

|
| # ? Jun 9, 2024 12:53 |
|
|
Rotors don�t exactly stop on a dime.
|
|
#
?
Mar 14, 2018 16:52
|
|
|
The obvious answer is an air bag system like the Mars Exploration Rovers. Nevermind it would probably weigh near as much as the aircraft and still splatter the occupants on the first bounce.
|
|
#
?
Mar 14, 2018 17:04
|
|



|
FrozenVent posted:Rotors don’t exactly stop on a dime. Little tiny ones like that do.
|
|
#
?
Mar 14, 2018 17:05
|
|
|
helicopters were a mistake edit: https://i.imgur.com/5ZoYZ9H.mp4 FuturePastNow fucked around with this message at 17:15 on Mar 14, 2018 |
|
#
?
Mar 14, 2018 17:09
|
|
|
Sagebrush posted:So you have an explosive bolt or spring-loaded anvil or something like that integrated into the parachute rocket motor, and it chops the main power line to the flight motors when the parachute deploys. So you're happily climbing, not thinking at all about how exactly that new MRO managed to save you so much money on your last check, or how you figured you could probably eke out a few hundred more hours from your time expired squibs, when BLAM! Your power cut squib goes off! Followed shortly by UNCANNILY QUIET LACK OF BLAM! as your chute squib doesn't. Or vice versa. So now you have to engineer your fully integrated safety chute/powerplant/electrical system to be murphy resistant and multiply redundant with lockouts to ensure it all works as intended and a way to ensure the lockouts work as intended. Which is certainly possible, but definitely not cheap or easy, which brings us back to the first sentence. And, compared to autorotation, is unquestionably more complex.
|
|
#
?
Mar 14, 2018 17:17
|
|

|
Finger Prince posted:If one of those chutes deploys on a fixed wing a/c when it isn't supposed to, it maybe gets tangled in the empenage when you cut it free, which would suck, but you can still fly. If one goes off on that multirotor, let's say when it's climbing, it's going to get tangled in half if not more of your propulsion rotors, and then you're hosed. Well then rocket release = battery power cut. This concludes this design team meeting, I will email the minutes to everyone. e: oh there was another page e2: As I am writing the minutes, I will make it look like it was my idea
|
|
#
?
Mar 14, 2018 17:21
|
|

|
I'd be curious to see how fool proof a computer would be at detecting a rotor out situation. Does it measure thrust? Rotation? Does a sensor failure of either of those two trick your computer to think a rotor is out when it's really not, leading to an entirely preventable rollover. Can aparachute deploy in the helicopter regime of that particular aircraft? The altitude seems awfully low for that. While engineering has solved problems much more difficult than this in the past, there are a lot of road blocks to a passively safe design.
|
|
#
?
Mar 14, 2018 17:23
|
|

|
um excuse me posted:I'd be curious to see how fool proof a computer would be at detecting a rotor out situation. Does it measure thrust? Rotation? Does a sensor failure of either of those two trick your computer to think a rotor is out when it's really not, leading to an entirely preventable rollover. Can aparachute deploy in the helicopter regime of that particular aircraft? The altitude seems awfully low for that. You could probably do it measuring electrical load on each motor, with an algorithm to differentiate between spinning with load (prop connected), and spinning with no load (shaft sheared), and all the other various possible failure modes. And you'd want at least two separate processes continually monitoring and cross checking, and if one flags some thing off, a no-go fault message is generated.
|
|
#
?
Mar 14, 2018 17:33
|
|
|
the obvious solution is a parachute for choppers.
|
|
#
?
Mar 14, 2018 17:35
|
|


|
tater_salad posted:the obvious solution is a parachute for choppers. That's a funny way of spelling rockets.
|
|
#
?
Mar 14, 2018 17:36
|
|
|
Finger Prince posted:That's a funny way of spelling rockets. it's from one of the nordic languages.
|
|
#
?
Mar 14, 2018 17:38
|
|
|
Just have the parachute come out of the front so it avoids the rotors and uses the tail as a crumple zone while crashing.
|
|
#
?
Mar 14, 2018 17:46
|
|

|
um excuse me posted:I'd be curious to see how fool proof a computer would be at detecting a rotor out situation. Does it measure thrust? Rotation? Does a sensor failure of either of those two trick your computer to think a rotor is out when it's really not, leading to an entirely preventable rollover. Can aparachute deploy in the helicopter regime of that particular aircraft? The altitude seems awfully low for that. You'd have multiple sensors with separate processors tracking their go/no-go state, and negotiating with each other about whether failures or real or not (There's a term for such a system that I can't remember, but it's a pretty standard thing). For extra redundancy, you'll be measuring multiple properties.
|
|
#
?
Mar 14, 2018 17:52
|
|

|
Yeah they�re called ballistic for a reason. The dead man enveloppe is really tiny, and they�ve saved people who had no business living when they pulled the handle.
|
|
#
?
Mar 14, 2018 18:04
|
|

|
FrozenVent posted:Rotors don�t exactly stop on a dime. um excuse me posted:I'd be curious to see how fool proof a computer would be at detecting a rotor out situation. Does it measure thrust? Rotation? Does a sensor failure of either of those two trick your computer to think a rotor is out when it's really not, leading to an entirely preventable rollover. Can aparachute deploy in the helicopter regime of that particular aircraft? The altitude seems awfully low for that.
|
|
#
?
Mar 14, 2018 18:12
|
|
|
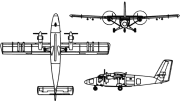
um excuse me posted:I'd be curious to see how fool proof a computer would be at detecting a rotor out situation. Does it measure thrust? Rotation? Does a sensor failure of either of those two trick your computer to think a rotor is out when it's really not, leading to an entirely preventable rollover. Can aparachute deploy in the helicopter regime of that particular aircraft? The altitude seems awfully low for that. I think you're giving helicopters too much credit here. Every helicopter comes with one of these:  From here: https://en.wikipedia.org/wiki/Helicopter_height%E2%80%93velocity_diagram That's a pretty big no-go area, but it's for a Huey, perhaps more modern helicopters have more forgiving parameters. Any sort of sling load scenario, of which there are hundreds or thousands happening all over the globe at any given point, is slap bang in the middle of that dead man's zone and an engine failure at that particular moment is probably fatal. Passively safe, not so much. And a thruster failure is perhaps not possible to detect 100% of the times while avoiding 100% of the false positive cases, but that's the case for all other flying systems as well. With simple sensors, it can measure the strain on the motor mounts and compare this to RPM and voltage, compare with the other motors, looking up what the values are supposed to be compared to the commanded setting etc etc. The amount of number crunching per second possible is huge, many scenarios will be caught and can be warned of in early stages. When you additionally have potential limp home modes with one or more motors out, this starts to look pretty good. Perfectly safe all the time? No, but then no aircraft is anyway. In this pic you can see the BRS box better:  It's fairly far from the inner rotors and once it's deployed, it's only a single cable attached to the center anyway. You can no problem deploy it in quite weird attitudes and still make it. Youtube has tons of BRS deployment videos, here's one of the more spectacular ones, to illustrate upset attitudes: https://www.youtube.com/watch?v=jgfG2DfPB6I At 2:20
|
|
#
?
Mar 14, 2018 18:32
|
|
|
How is having 8-10 small rotors in a circle better than two big co-axial rotors with the same net diameter?
|
|
#
?
Mar 14, 2018 19:00
|
|

|
INTJ Mastermind posted:How is having 8-10 small rotors in a circle better than two big co-axial rotors with the same net diameter? This is what I've been wondering, too. My gut instinct is that a few big rotors/motors are way more efficient than many small rotors/motors.
|
|
#
?
Mar 14, 2018 19:42
|
|

|
a few big rotors is just a helicopter so it isn't ~disruptive~
|
|
#
?
Mar 14, 2018 19:46
|
|
|
One advantage is that you can use cheaper, simpler fixed-pitch blades instead of variable-pitched blades. Also the scaling factors mean that larger rotors and engines are harder to make and more expensive even without the fixed vs variable pitch issue.
|
|
#
?
Mar 14, 2018 19:52
|
|

|
Sagebrush posted:a few big rotors is just a helicopter so it isn't ~disruptive~ It's sort of this, actually. Multirotor is easier than cyclic/collective in small applications and it's the small applications which have grown bigger on the drone hype. Multirotor is probably mechanically simpler than cyclic/collective, it's simply not been feasible to do a 4+ multirotor setup from a fossil power plant before due to obvious reasons. Less efficient? Depends on what you measure. For now, electric multirotor is just fun and games. If it develops into something serious, I bet it will start taking fossil business due to being cheaper per unit of moved cargo, not faster or with better range.
|
|
#
?
Mar 14, 2018 19:56
|
|
|
I cant imagine the noise that a few of these flying around will make. Helicopters are bad enough.
|
|
#
?
Mar 14, 2018 21:07
|
|

|
Multis really started poppin' once we had easily available motors that make a lot of power and can accelerate quickly paired with high density, high current batteries- ie brushless and lipo, and cheap enough flight computer hardware to sync it all together. So the advantage is that the home engineer doesn't need to worry about making a reliable drivetrain, or a mechanically robust cyclic/collective control system, or know much about conventional rotary wing aerodynamics. And the professional guys scaling up with tiny composite airframes have a much larger base of these products to draw upon, which are easier to test in scale than a new conventional rotor system. BRS' are very effective but I wonder how well they scale up to weights of aircraft that can actually do work, since small fixed wing craft are very lightweight for their size compared to helicopters, and batteries that give more than 20 minutes of runtime are probably going to become very heavy as payload increases. It'll be interesting to see if this tech is able to break out of the "manned sporty tech demo" size of craft. I think I will still prefer to sit on something with a purely aerodynamic recovery mode given the choice. D C posted:I cant imagine the noise that a few of these flying around will make. Helicopters are bad enough. Version 2 has twelve NOTAR tail booms vertically arranged around the cockpit instead of the multi rotor setup.
|
|
#
?
Mar 14, 2018 21:10
|
|
|
dblpost
|
|
#
?
Mar 14, 2018 21:12
|
|
|
Whether or not these aircraft have a use today in their current forms, it's probably good to explore the limits of this tech and develop it. IF we ever have a significant breakthrough in battery power density, aircraft like this become a whole lot more appealing and likely sufficiently cheaper to operate than helicopters for a whole host of uses.
|
|
#
?
Mar 14, 2018 21:42
|
|

|
bull3964 posted:Whether or not these aircraft have a use today in their current forms, it's probably good to explore the limits of this tech and develop it. It already has in some areas, but perhaps not in an "fossil apples to electric apples" kind of way. Aerial photography used to mean two people and a camera carried aloft, turns out you only need to carry the camera on a drone to do many of the jobs. For specialized lifting, you needn't fly the aircraft, two guys and a cable from the air base and then hook it up while flying. You could carry a field riggable lifting drone on a truck, along with a few spare battery packs. Maybe some sighting aids to help the computer place the thing with precision, etc etc. You can pick away at a lot of niche edge cases with the current battery tech.
|
|
#
?
Mar 14, 2018 22:13
|
|
|
INTJ Mastermind posted:How is having 8-10 small rotors in a circle better than two big co-axial rotors with the same net diameter? Holy hell that pilot was 2000% toast.
|
|
#
?
Mar 14, 2018 22:26
|
|
|
I think all this failure detection stuff for the multirotor is a red herring. Surely the control system for this craft would be fly by wire, automatically stabilizing around a commanded attitude or attitude rate (if not something even higher level than that, such as translation rate). So, it's already correcting for upsets regardless of the source, and a pitch and roll due to losing 1/3 of the thrust on one corner would be indistinguishable from the same pitch and roll due to, say, a strong gust; and automatically corrected for by the control system's natural behavior. Now, maybe a failure warning might be valuable in telling the control system just a bit quicker that the pitch and roll is coming, and thus help it compensate proactively. But it's an accident of circumstance whether that signal would come quick enough to matter (i.e., does the pitch and roll happen first anyway). Such a system would be an ancillary help to the attitude compensation, not fundamental to it. The clever part is designing the craft to be running at enough of a power margin that the other 2 rotors in the same corner can pick up the slack.
|
|
#
?
Mar 15, 2018 04:33
|
|
|
.
sincx fucked around with this message at 05:49 on Mar 23, 2021 |
|
#
?
Mar 15, 2018 05:12
|
|

|
evil_bunnY posted:Holy hell that pilot was 2000% toast. I like the flaming airframe dragged across the ground by the chute. This happens a lot with high power rockets too: finally get out to the GPS point and you can see your 10 foot chute is still fully inflated and has been dragging your carefully painted rocket across the dirt for 45 minutes. vessbot posted:I think all this failure detection stuff for the multirotor is a red herring. Oh definitely. There are a great deal of jobs that don't require a man onboard anyways. For that pusher-multi-plane-copter thing, I'm really just curious what kind of power margin it has to deal with that stuff, since they did decide to stick a guy inside.
|
|
#
?
Mar 15, 2018 05:21
|
|
|
tater_salad posted:the obvious solution is a parachute for choppers. No no, just attach a big bag filled with a gas less dense then air, and attach the rotors around that. That way you get increased heavy lift capability to boot. You could use it to get lumber from hard to reach spots and everything.
|
|
#
?
Mar 15, 2018 06:06
|
|

|
Flip the rotors upside down and then the thrust will inflate your parachute and you fly away.
|
|
#
?
Mar 15, 2018 06:34
|
|
|
blugu64 posted:No no, just attach a big bag filled with a gas less dense then air, and attach the rotors around that. That way you get increased heavy lift capability to boot. You could use it to get lumber from hard to reach spots and everything. I can show other people in my engineering undergrad program the Helistat video, and every time the room goes silent, jaws are hanging open and faces are covered in looks of utter horror. It's the best.
|
|
#
?
Mar 15, 2018 06:51
|
|


|
Enourmo posted:I can show other people in my engineering undergrad program the Helistat video, and every time the room goes silent, jaws are hanging open and faces are covered in looks of utter horror. The Piasecki one or the competitor that spun? https://www.youtube.com/watch?v=uWfX9wAiMm4
|
|
#
?
Mar 15, 2018 07:10
|
|

|
vessbot posted:
For the stability system, yes. But if you were trusting your life to it, it would be very much in your interest to know if one of the rotors failed, so you can abort the flight safely. Like I wrote above, you don't want the system to compensate for a failed rotor without telling you, or continuing autonomously without a plan B, because then it just backs you into a corner you suddenly can't get out of, if the failures stack up. It should also tell you which maneuvers to avoid, as your power and maneuvering margins will be reduced in some directions more than others.
|
|
#
?
Mar 15, 2018 07:26
|
|
|
The 10,000th 737 rolled out the other day. It's -8 MAX going to Southwest. http://boeing.mediaroom.com/2018-03-13-Boeing-Recognized-by-GUINNESS-WORLD-RECORDS-TM-for-10-000th-737
|
|
#
?
Mar 15, 2018 07:37
|
|

|
I'm surprised that they did the 'amount of times around earth' instead of '737s have flown 122 billion miles - ~9.2 times the distance of Voyager I from Earth.' And the interesting link I used to find the exact figures: https://voyager.jpl.nasa.gov/mission/status/ Still a minuscule amount in relation to a light year, though - that's roughly six trillion miles. BIG HEADLINE fucked around with this message at 07:47 on Mar 15, 2018 |
|
#
?
Mar 15, 2018 07:41
|
|

|
BIG HEADLINE posted:I'm surprised that they did the 'amount of times around earth' instead of '737s have flown 122 billion miles - ~9.2 times the distance of Voyager I from Earth.' How about �thirteen hundred trips to the Sun�? One way.
|
|
#
?
Mar 15, 2018 07:50
|
|

|

|
| # ? Jun 9, 2024 12:53 |
|
|
L. Ron Hubbard should've written about 737s with rocket engines instead of DC-8s. 
|
|
#
?
Mar 15, 2018 08:07
|
|